¿Cuál es el método de linealización del sistema? Método de linealización armónica
Reglas para ingresar funciones:
- Todas las variables se expresan mediante x 1 , x 2
- Todas las operaciones matemáticas se expresan mediante símbolos generalmente aceptados (+,-,*,/,^). Por ejemplo, x 1 2 +x 1 x 2, escríbalo como x1^2+x1*x2.
Todos los métodos considerados a continuación se basan en la expansión de una función no lineal de forma general f(x) en una serie de Taylor a términos de primer orden en la vecindad de algún punto x 0:
Dónde ![]() – término descartado de segundo orden de pequeñez.
– término descartado de segundo orden de pequeñez.
Por tanto, la función f(x) se aproxima en el punto x 0 mediante una función lineal:
,
donde x 0 es el punto de linealización.
Comentario. La linealización debe usarse con mucho cuidado porque a veces da una aproximación muy aproximada.
Problema general de programación no lineal.
Considere un problema general de programación no lineal:
Sea x t una estimación dada de la solución. El uso de linealización directa conduce al siguiente problema:

Esta tarea es un PLP. Resolviéndolo, encontramos una nueva aproximación x t +1, que puede no pertenecer a la región de solución S admisible.
Si , entonces el valor óptimo de la función objetivo linealizada que satisface la desigualdad:
Puede que no sea una estimación precisa. significado verdaderoóptimo.
Para la convergencia a un extremo, es suficiente que para la secuencia de puntos ( x t) obtenida como resultado de resolver una secuencia de subproblemas de LP, se cumpla la siguiente condición:
el valor de la función objetivo y la discrepancia de la restricción en el punto x t +1 deben ser menores que sus valores en el punto x t.
Ejemplo No. 1. 
Construyamos una región admisible S (ver figura).

La región factible S consta de puntos de la curva h(x)=0 que se encuentran entre el punto (2;0), definido por la restricción x 2 ≥0, y el punto (1;1), definido por la restricción g( x) ≥0.
Como resultado de la linealización del problema en el punto x 0 =(2;1), obtenemos el siguiente ZLP:

Aquí es un segmento de línea recta delimitado por los puntos (2,5; 0,25) y (11/9; 8/9). Las líneas de nivel de la función objetivo linealizada son líneas rectas con una pendiente de -2, mientras que las líneas de nivel de la función objetivo original son círculos centrados en el punto (0;0). Está claro que la solución al problema linealizado es el punto x 1 = (11/9; 8/9). En este punto tenemos:

por lo que se viola la restricción de igualdad. Realizada una nueva linealización en el punto x 1, obtenemos un nuevo problema:

La nueva solución se encuentra en la intersección de las líneas. ![]() y y tiene coordenadas x 2 = (1.0187; 0.9965). Restricción – igualdad (
y y tiene coordenadas x 2 = (1.0187; 0.9965). Restricción – igualdad ( ![]() ) todavía se viola, pero en menor medida. Si realizamos dos iteraciones más, obtendremos una muy buena aproximación a la solución x * =(1;1), f(x *)=2
) todavía se viola, pero en menor medida. Si realizamos dos iteraciones más, obtendremos una muy buena aproximación a la solución x * =(1;1), f(x *)=2
Tabla - Valores de la función objetivo para algunas iteraciones:
| Iteración | F | gramo | h |
| 0 | 5 | 3 | –1 |
| 1 | 2,284 | 0,605 | –0,0123 |
| 3 | 2,00015 | 3,44×10-4 | –1,18×10-5 |
| Óptimo | 2 | 0 | 0 |
De la tabla se desprende claramente que valores f, g yh mejorar monótonamente. Sin embargo, dicha monotonicidad es típica de problemas cuyas funciones son “moderadamente” no lineales. En el caso de funciones con una no linealidad pronunciada, la monotonía de mejora se rompe y el algoritmo deja de converger.
Hay tres formas de mejorar los métodos de linealización directa:
1. Usar aproximación lineal para encontrar la dirección de descenso.
2. Aproximación global de la función no lineal del problema utilizando una función lineal por partes.
3. Aplicación de linealizaciones sucesivas en cada iteración para aclarar la región S admisible.
El método de linealización armónica (equilibrio armónico) permite determinar las condiciones de existencia y los parámetros de posibles autooscilaciones en sistemas de control automático no lineales. Las autooscilaciones están determinadas por ciclos límite en el espacio de fase de los sistemas. Los ciclos límite dividen el espacio (en general - multidimensional) en la región de procesos de descomposición y divergentes. Como resultado del cálculo de los parámetros de las autooscilaciones, se puede llegar a una conclusión sobre su admisibilidad para un sistema determinado o sobre la necesidad de cambiar los parámetros del sistema.
El método permite:
Determinar las condiciones de estabilidad para un sistema no lineal;
Encuentre la frecuencia y amplitud de las oscilaciones libres del sistema;
Sintetizar circuitos de corrección para garantizar los parámetros requeridos de autooscilaciones;
Investigar oscilaciones forzadas y evaluar la calidad de procesos transitorios en sistemas de control automático no lineales.
Condiciones para la aplicabilidad del método de linealización armónica.
1) Cuando se utiliza el método se supone que lineal parte del sistema es estable o neutral.
2) La señal en la entrada del enlace no lineal tiene una forma similar a la señal armónica. Esta disposición requiere aclaración.
La Figura 1 muestra los diagramas de bloques de un sistema de control automático no lineal. El circuito consta de enlaces conectados en serie: un enlace no lineal y=F(x) y un enlace lineal
th, que se describe mediante la ecuación diferencial
Cuando y = F(g - x) = g - x obtenemos la ecuación de movimiento del sistema lineal.
Consideremos la libre circulación, es decir para g(t) º 0. Entonces,
En el caso de que existan autooscilaciones en el sistema, el libre movimiento del sistema es periódico. El movimiento no periódico a lo largo del tiempo finaliza cuando el sistema se detiene en una determinada posición final (normalmente en un limitador especialmente proporcionado).
Para cualquier forma de señal periódica en la entrada de un elemento no lineal, la señal en su salida contendrá armónicos más altos además de la frecuencia fundamental. La suposición de que la señal en la entrada de la parte no lineal del sistema puede considerarse armónica, es decir, que
x(t)@a×sin(peso),
donde w=1/T, T es el período de oscilaciones libres del sistema, equivale al supuesto de que la parte lineal del sistema es efectivamente filtros armónicos superiores de la señal y(t) = F(x (t)).
En el caso general, cuando un elemento no lineal de una señal armónica x(t) actúa en la entrada, la señal de salida se puede transformar en Fourier:
Coeficientes de la serie de Fourier
Para simplificar los cálculos, asumimos que C 0 =0, es decir, que la función F(x) es simétrica con respecto al origen. Esta limitación no es necesaria y se realiza mediante análisis. La aparición de coeficientes C k ¹ 0 significa que, en el caso general, la conversión de señal no lineal va acompañada de cambios de fase de la señal convertida. En particular, esto ocurre en no linealidades con características ambiguas (con varios tipos de bucles de histéresis), tanto con retardo como, en algunos casos, avance de fase.
La suposición de filtrado efectivo significa que las amplitudes de los armónicos más altos en la salida de la parte lineal del sistema son pequeñas, es decir
El cumplimiento de esta condición se ve facilitado por el hecho de que en muchos casos las amplitudes de los armónicos directamente en la salida de no linealidad resultan ser significativamente menores que la amplitud del primer armónico. Por ejemplo, en la salida de un relé ideal con una señal armónica en la entrada
y(t)=F(с×sin(wt))=a×signo(sin(wt))
no hay armónicos pares y la amplitud del tercer armónico es tres veces menor que la amplitud del primer armónico
Vamos a hacerlo evaluación del grado de supresión armónicos más altos de la señal en la parte lineal del ACS. Para ello, haremos una serie de suposiciones.
1) Frecuencia de oscilaciones libres del ACS. aproximadamente igual a la frecuencia de corte su parte lineal. Tenga en cuenta que la frecuencia de oscilaciones libres de un SCA no lineal puede diferir significativamente de la frecuencia de oscilaciones libres de un sistema lineal, por lo que esta suposición no siempre es correcta.
2) Tomemos el índice de oscilación ACS igual a M=1,1.
3) LAC en las proximidades de la frecuencia de corte (w c) tiene una pendiente de -20 dB/dec. Los límites de esta sección de ALC están relacionados con el índice de oscilación por las relaciones
4) La frecuencia w max se conjuga con la sección LFC, de modo que en w > w max la pendiente LAC no es inferior a -40 dB/dec.
5) No linealidad: un relé ideal con característica y = signo(x) de modo que solo estarán presentes armónicos impares en su salida de no linealidad.
Frecuencias del tercer armónico w 3 = 3w c, quinto w 5 = 5w c,
logw 3 = 0,48+logw c ,
logw 5 = 0,7+logw c .
Frecuencia w máx = 1,91 w s, logw máx = 0,28+lgw s. La frecuencia de esquina está a 0,28 décadas de la frecuencia de corte.
La disminución de las amplitudes de los armónicos superiores de la señal cuando pasan por la parte lineal del sistema será para el tercer armónico
L 3 = -0,28×20-(0,48-0,28)×40 = -13,6 dB, es decir, 4,8 veces,
para el quinto - L 5 = -0,28×20-(0,7-0,28)×40 = -22,4 dB, es decir, 13 veces.
En consecuencia, la señal en la salida de la parte lineal estará cerca de la armónica.
Esto equivale a suponer que el sistema es un filtro de paso bajo.
La mayoría de los sistemas reales son no lineales, es decir El comportamiento del sistema se describe mediante las ecuaciones:
A menudo, en la práctica, los sistemas no lineales pueden aproximarse mediante sistemas lineales en una determinada región limitada.
pretendamos que  porque la ecuación (1) es conocida. Reemplacemos el sistema (1,2) sustituyendo las condiciones iniciales
porque la ecuación (1) es conocida. Reemplacemos el sistema (1,2) sustituyendo las condiciones iniciales

Suponemos que los estados iniciales y la variable de entrada
 cambiado para que el nuevo estado y la variable de entrada
cambiado para que el nuevo estado y la variable de entrada
 tiene la siguiente forma.
tiene la siguiente forma.

Salida  encontramos como resultado de resolver las ecuaciones perturbadas.
encontramos como resultado de resolver las ecuaciones perturbadas.

Expandamos el lado derecho en una serie de Taylor.
 -término de error residual de segundo orden de pequeñez.
-término de error residual de segundo orden de pequeñez.
Restando la solución original de las expansiones, obtenemos las siguientes ecuaciones linealizadas:

 .
.
Denotamos derivadas parciales como coeficientes dependientes del tiempo.
Estas expresiones se pueden reescribir como


Obtenemos ecuaciones linealizadas en puntos de equilibrio.  .
.
 . En el punto
. En el punto
Solución a esta ecuación

Diferenciamos el lado derecho de la ecuación original con respecto a X, obtenemos
 .
.
Linealicemos la ecuación para un valor inicial arbitrario.  .
.
Obtenemos un sistema linealizado en forma de ecuación no estacionaria.
La solución del sistema linealizado tiene la forma:
 .
.
1.7. Alteraciones típicas
Las influencias perturbadoras externas pueden ser de diferente naturaleza:
Acción instantánea en forma de impulso y acción constante.
Si se diferencia en el tiempo  , Eso
, Eso  , por lo tanto, la función (t) representa la derivada temporal de una acción de un solo paso.
, por lo tanto, la función (t) representa la derivada temporal de una acción de un solo paso.
(t): la función cuando está integrada tiene las siguientes propiedades de filtrado:
Producto integrable de una función arbitraria  Las funciones y(t) se filtran de todos los valores.
Las funciones y(t) se filtran de todos los valores.  sólo el que corresponde al momento de aplicación de un impulso unitario instantáneo.
sólo el que corresponde al momento de aplicación de un impulso unitario instantáneo.
|
perturbación lineal |
perturbación armónica
|

2 U. Sistemas de segundo orden
2.1 Reducción de ecuaciones de segundo orden a sistemas de ecuaciones de primer orden
Un ejemplo de un sistema estacionario lineal.
Otra descripción del mismo sistema de segundo orden viene dada por un par de ecuaciones diferenciales de primer orden acopladas
 (2)
(2)
donde la relación entre los coeficientes de estas ecuaciones está determinada por las siguientes relaciones

2.2. Resolver ecuaciones de segundo orden
Usando el operador diferencial  la ecuación se puede presentar en una forma más compacta
la ecuación se puede presentar en una forma más compacta
La ecuación (1) se resuelve en 3 etapas:
1) encontrar la solución general  ecuación homogénea;
ecuación homogénea;
2) encontrar una solución particular  ;
;
3) la solución completa es la suma de estas dos soluciones  .
.
Considere la ecuación homogénea.
buscaremos una solución en la forma
 (5)
(5)
Dónde  cantidad real o compleja. Sustituyendo (5) en (4) obtenemos
cantidad real o compleja. Sustituyendo (5) en (4) obtenemos
 (6)
(6)
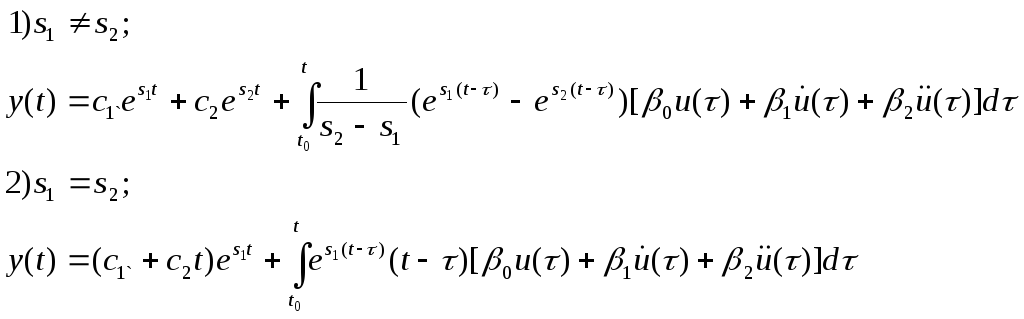
Esta expresión es una solución de una ecuación homogénea si s satisface la ecuación característica
Para s 1 s 2, la solución de la ecuación homogénea tiene la forma
Luego buscamos una solución en la forma  y sustituyéndolo en la ecuación original
y sustituyéndolo en la ecuación original
De donde se sigue que  .
.
Si seleccionas
 .
(8)
.
(8)
Buscamos una solución particular a la ecuación original (1) usando el método de variación.  en la forma de
en la forma de

Con base en (11), (13) obtenemos el sistema

Solución completa de la ecuación.

Cambiando variables obtenemos una ecuación de segundo orden:
PLANO DE FASE
Un espacio de estados bidimensional o plano de fase es un plano en el que se consideran dos variables de estado en un sistema de coordenadas rectangular.
 - estas variables de estado forman un vector
- estas variables de estado forman un vector  .
.
Cambiar horario  forma una trayectoria de movimiento. Es necesario indicar la dirección del movimiento de la trayectoria.
forma una trayectoria de movimiento. Es necesario indicar la dirección del movimiento de la trayectoria.
El estado de equilibrio se llama tal estado.  , en el que el sistema permanece siempre que
, en el que el sistema permanece siempre que  El estado de equilibrio se puede determinar (si existe) a partir de las relaciones
El estado de equilibrio se puede determinar (si existe) a partir de las relaciones

a cualquiera t.
Los estados de equilibrio a veces se denominan puntos críticos, fundamentales o cero.
Las trayectorias del sistema no pueden cruzarse entre sí en el espacio, lo que también implica la unicidad de la solución de la ecuación diferencial.
Ninguna trayectoria pasa por un estado de equilibrio, aunque pueden acercarse a puntos singulares arbitrariamente cercanos (en  )
.
)
.
tipos de puntos
1 Un punto regular es cualquier punto por el cual puede pasar una trayectoria; el punto de equilibrio no es regular.
2. Un punto de equilibrio está aislado si su pequeña vecindad contiene sólo puntos regulares.
Considere el sistema

Para determinar el estado de equilibrio, resolvemos el siguiente sistema de ecuaciones
 .
.
Obtenemos la dependencia entre variables de estado.  .
.
cualquier punto del cual se encuentra en estado de equilibrio. Estos puntos no están aislados.
Tenga en cuenta que para un sistema estacionario lineal

el estado inicial resulta ser un estado de equilibrio y está aislado si el determinante de la matriz de coeficientes  , Entonces
, Entonces  hay un estado de equilibrio.
hay un estado de equilibrio.
Para un sistema no lineal de segundo orden, el estado de equilibrio es  llamado simple, si la matriz jacobiana correspondiente no es igual a 0.
llamado simple, si la matriz jacobiana correspondiente no es igual a 0.

De lo contrario el Estado no será sencillo. Si el punto de equilibrio es simple, entonces está aislado. Lo contrario no es necesariamente cierto (excepto en el caso de sistemas lineales estacionarios).
Considere la solución a la ecuación de estado de un sistema lineal de segundo orden:  .
.
Este sistema se puede representar mediante dos ecuaciones de primer orden,
vamos a denotar  ,
,

Ecuación característica  y la solución sería:
y la solución sería:

La solución de la ecuación se escribe en la forma

Según la naturaleza del funcionamiento del ACS, se dividen en 4 clases: Los sistemas de estabilización automática se caracterizan por el hecho de que durante el funcionamiento del sistema, la influencia de referencia permanece constante. En los sistemas de control de programas la influencia de referencia cambia según una ley predeterminada en función del tiempo y de las coordenadas del sistema. Servosistemas, la acción de referencia es un valor variable, pero no se puede establecer una descripción matemática en el tiempo.Sistemas adaptativos o autoajustables tales sistemas automáticamente...
Comparte tu trabajo en las redes sociales.
Si esta obra no le conviene, al final de la página hay una lista de obras similares. También puedes utilizar el botón de búsqueda.
Conferencia número 2. Clasificación y Requisitos para ATS. ATS lineales y no lineales. Método de linealización general
(Diapositiva 1)
2.1. Clasificación de ETA
(Diapositiva 2)
Los ETA se clasifican según varios criterios. Según la naturaleza de su funcionamiento, el ATS se divide en 4 clases:
- Sistemas estabilización automática(caracterizado por el hecho de que durante el funcionamiento del sistema la influencia de referencia permanece constante).Ejemplo: estabilizador de velocidad del motor.
- Sistemas regulación del programa(la influencia de referencia cambia según una ley predeterminada, en función del tiempo y de las coordenadas del sistema).Ejemplo: piloto automático.
- Seguidores sistema (la influencia de configuración es un valor variable, pero no se puede establecer una descripción matemática en el tiempo, ya que la fuente de la señal es una influencia externa, cuya ley de movimiento no se conoce de antemano).Ejemplo: radar de seguimiento de aeronaves.
- Adaptado o sistemas de autoajuste (dichos sistemas seleccionan automáticamente la ley de control óptima y pueden cambiar las características del controlador durante la operación).Ejemplo: juego de ordenador con una trama no lineal.
(Diapositiva 3)
El ATS también se divide según la naturaleza de las señales en el dispositivo de control:
- Continuo (Las señales de entrada y salida son funciones continuas del tiempo).Ejemplo: comparadores, amplificadores operacionales.
- Relé (si el sistema tiene al menos un elemento con característica de relé).Ejemplo: varios relés, interruptores analógicos y multiplexores.
- Legumbres (caracterizado por la presencia de al menos un elemento de impulso).Ejemplo: tiristores, circuitos digitales.
Todos los ACS se pueden dividir según la dependencia de las características de salida de las de entrada en lineal y no lineal.
2.2. Requisitos para el ATS
(Diapositiva 4)
1. La cantidad controlada debe mantenerse en un nivel determinado independientemente de las perturbaciones. El proceso transitorio parece ser una característica dinámica por la cual se puede juzgar la calidad del sistema.
2. Debe cumplirse la condición de estabilidad, es decir el sistema debe tener un margen de estabilidad.
3. Tiempo de ejecución del proceso de transición, que caracteriza la velocidad de respuesta del sistema.
(Diapositiva 5)
4. Se deben cumplir los estándares de exceso. Para determinar la cantidad de exceso, se utilizan dos parámetros principales:
- factor de sobreimpulso
donde estoy desviación máxima del valor de salida durante el proceso transitorio, y∞ Valor de la cantidad de salida en estado estacionario. Valor permitido = 0 25% .
(Diapositiva 6)
- Medida de oscilación del proceso Número de oscilaciones durante el proceso de transición (no más de 2)
5. Debe cumplirse el requisito de precisión estática. Si los procesos en el sistema son aleatorios, entonces se introducen características probabilísticas para garantizar la precisión.
2. 3 . ATS lineales y no lineales
Los procesos dinámicos en los sistemas de control se describen mediante ecuaciones diferenciales.
(Diapositiva 7)
En los sistemas lineales, los procesos se describen utilizandodiferencial linealecuaciones. En sistemas no lineales, los procesos se describen mediante ecuaciones que contienen algunos no linealidad . Los cálculos para sistemas lineales están bien desarrollados y son más fáciles de realizar. aplicación práctica. Los cálculos de sistemas no lineales suelen plantear grandes dificultades.
Para que el sistema de control sea lineal, es necesario (pero no suficiente) que las características estáticas de todos los eslabones estén en forma de líneas rectas. En realidad, las características estáticas reales no son lineales en la mayoría de los casos. Por lo tanto, para calcular un sistema real como lineal, es necesario reemplazar todas las características estáticas curvilíneas de los enlaces en las áreas de trabajo que se utilizan en este proceso de control con segmentos rectos. Se llama linealización . La mayoría de los sistemas de control continuo son susceptibles de dicha linealización.
(Diapositiva 8)
Los sistemas lineales se dividen ensistemas lineales ordinarios y en Sistemas lineales especiales.Los primeros incluyen sistemas de este tipo, cuyos vínculos se describen mediante ecuaciones diferenciales lineales ordinarias con coeficientes constantes.
(Diapositiva 9)
Los sistemas lineales especiales incluyen:
A) sistemas con parámetros variables en el tiempo, que se describen mediante diferencial linealecuaciones con coeficientes variables;
b) sistemas con parámetros distribuidos, donde hay que tratar con ecuaciones diferenciales parciales y sistemas con retardo de tiempo, descritos por ecuaciones con argumento retardado;
(Diapositiva 10)
V) sistemas de pulso, donde tenemos que lidiar con ecuaciones en diferencias.
(Diapositiva 11)
Arroz. 2.1. Características de los elementos no lineales.
En sistemas no lineales, al analizar el proceso de control, es necesario tener en cuenta la no linealidad de la característica estática en al menos uno de sus eslabones o algunas dependencias diferenciales no lineales en las ecuaciones de la dinámica del sistema. A veces, se introducen enlaces no lineales especialmente en el sistema para garantizar la máxima velocidad u otras cualidades deseadas.
Los sistemas no lineales incluyen principalmente sistemas de relés, ya quecaracterística del relé(Figura 2.1, a y b ) no puede ser reemplazado por una sola línea recta. Un enlace será no lineal si sus características incluyenzona muerta(Figura 2.1, c).
Fenómenos de saturación o limitación de carrera mecánicaconducen a una característica con dependencia lineal limitada en los extremos (Fig. 2.1, gramos ). Esta característica también debe considerarse no lineal si se consideran tales procesos cuando el punto de operación va más allá de la porción lineal de la característica.
Las dependencias no lineales también incluyencurva de histéresis(Figura 2.1, d ), característicaholgura en transmisión mecánica(Fig.2.1, f), fricción seca (Fig.2.1, g), fricción cuadrática(Figura 2.1, y ) etc. En las dos últimas características x1 denota la velocidad del movimiento, y x2 fuerza o momento de fricción.
En general, cualquier relación curvilínea entre los valores de salida y entrada de un enlace no es lineal (Fig. 2.1, A ). Éstas son no linealidades del tipo más simple. Además, las no linealidades pueden incluirse en ecuaciones diferenciales en forma de producto de variables y sus derivadas, así como en forma de dependencias funcionales más complejas.
No todas las dependencias no lineales pueden linealizarse fácilmente. Por ejemplo, no se puede realizar la linealización para las características que se muestran en la Fig. 2.1, a o en la Fig. 2.1, e. Estos casos complejos se considerarán en la Sección. 9.
2.4. Método de linealización general
(Diapositiva 12)
En la mayoría de los casos, es posible linealizar relaciones no lineales utilizando el método de pequeñas desviaciones o variaciones. Para considerarlo, pasemos a un vínculo determinado en el sistema de control automático (Fig. 2.2). Las cantidades de entrada y salida se designan por X1 y X2 , y perturbaciones externas a través de Pie).
Supongamos que el vínculo se describe mediante alguna ecuación diferencial no lineal de la forma
. (2.1)
Para elaborar dicha ecuación, es necesario utilizar la rama correspondiente de las ciencias técnicas (por ejemplo, ingeniería eléctrica, mecánica, hidráulica, etc.) que estudie este tipo específico de dispositivo.
(Diapositiva 13)
La base para la linealización es el supuesto de que las desviaciones de todas las variables incluidas en la ecuación de la dinámica del enlace son suficientemente pequeñas, ya que es en un área suficientemente pequeña que la característica curvilínea puede ser reemplazada por un segmento de línea recta. Las desviaciones de las variables se miden a partir de sus valores en un proceso estacionario o en un determinado estado de equilibrio del sistema. Supongamos, por ejemplo, que un proceso estable se caracterice por un valor constante de la variable X1 , que denotamos X10 . Durante el proceso de regulación (Fig. 2.3) la variable X1 importará
donde denota la desviación de la variable X1 desde valor estable X10.
Se introducen relaciones similares para otras variables. Para el caso que nos ocupa tenemos:
y
Se supone que todas las desviaciones son suficientemente pequeñas. Esta suposición matemática no contradice el significado físico del problema, ya que la idea misma de control automático requiere que todas las desviaciones de la cantidad controlada durante el proceso de control sean suficientemente pequeñas.
El estado estacionario del enlace está determinado por los valores X10, X20 y F0 . Entonces la ecuación (2.1) se puede escribir para el estado estacionario en la forma
. (2.2)
(Diapositiva 15)
Expandamos el lado izquierdo de la ecuación (2.1) en una serie de Taylor.
(2.3)
donde miembros de orden superior. El índice 0 para derivadas parciales significa que después de tomar la derivada, el valor de estado estacionario de todas las variables debe sustituirse en su expresión.
; ; ; .
Los términos de orden superior en la fórmula (2.3) incluyen derivadas parciales superiores multiplicadas por cuadrados, cubos y grados superiores de desviaciones, así como productos de desviaciones. Serán pequeñas de orden superior en comparación con las desviaciones mismas, que son pequeñas de primer orden.
(Diapositiva 16)
La ecuación (2.3) es una ecuación de dinámica de enlaces, igual que (2.1), pero escrita de una forma diferente. Descartemos las pequeñas de orden superior en esta ecuación, después de lo cual restamos las ecuaciones de estado estacionario (2.2) de la ecuación (2.3). Como resultado, obtenemos la siguiente ecuación aproximada para la dinámica de un enlace en pequeñas desviaciones:
(2.4)
Todas las variables y sus derivadas entran en esta ecuación de forma lineal, es decir, en primer grado. Todas las derivadas parciales representan unos coeficientes constantes si se estudia un sistema con parámetros constantes. Si el sistema tiene parámetros variables, entonces la ecuación (2.4) tendrá coeficientes variables. Consideremos sólo el caso de coeficientes constantes.
(Diapositiva 17)
Obtener la ecuación (2.4) es el objetivo de la linealización realizada. En la teoría del control automático, se acostumbra escribir las ecuaciones de todos los enlaces de modo que el lado izquierdo de la ecuación contenga el valor de salida y todos los demás términos se transfieran al lado derecho. En este caso, todos los términos de la ecuación se dividen por el coeficiente del valor de salida. Como resultado, la ecuación (2.4) toma la forma
, (2.5)
donde se introducen las siguientes notaciones
(Diapositiva 18)
Además, por conveniencia, se acostumbra escribir todas las ecuaciones diferenciales en forma de operador con la notación
Etc.
Entonces la ecuación diferencial (2.5) se escribirá en la forma
, (2.6)
Llamaremos a esta entrada la forma estándar de escribir la ecuación de dinámica de enlaces.
Coeficientes T 1 y T 2 tiene una dimensión temporal de segundo. Esto se desprende del hecho de que todos los términos de la ecuación (2.6) deben tener la misma dimensión y, por ejemplo, dimensión (o px 2 ) difiere de la dimensión x2 durante un segundo elevado a la primera potencia (-1 ). Por lo tanto los coeficientes T 1 y T 2 se llaman constantes de tiempo.
Coeficiente k 1 tiene la dimensión de la cantidad de salida dividida por la dimensión de la entrada. Se llamacoeficiente de transmisiónenlace Para enlaces en los que las cantidades de salida y entrada tienen las mismas dimensiones, también se utilizan los siguientes términos: ganancia para un enlace que es un amplificador o contiene un amplificador; relación de transmisión para cajas de cambios, divisores de voltaje, dispositivos de escala, etc.
El coeficiente de transmisión caracteriza las propiedades estáticas del enlace, como en estado estacionario. En consecuencia, determina la pendiente de la característica estática para pequeñas desviaciones. Si representamos toda la característica estática real del enlace, entonces la linealización da o. Coeficiente de transferencia k 1 será la tangente del ángulo de inclinación tangente en ese punto C (ver Fig. 2.3), a partir del cual se miden pequeñas desviaciones x1 y x2.
Se puede ver en la figura que la linealización de la ecuación realizada anteriormente es válida para procesos de control que cubren dicha sección de la característica. AB , en el que la tangente difiere poco de la propia curva.
(Diapositiva 19)
De esto se desprende además otro método gráfico de linealización. Si se conocen la característica estática y el punto C , que determina el estado estacionario alrededor del cual ocurre el proceso de regulación, luego el coeficiente de transmisión en la ecuación de enlace se determina gráficamente a partir del dibujo de acuerdo con la dependencia k 1 = tan c teniendo en cuenta la escala del dibujo y las dimensiones. x2 . En muchos casosmétodo de linealización gráficaresulta más conveniente y conduce más rápido a la meta.
(Diapositiva 20)
Dimensión del coeficiente k 2 igual a la dimensión del coeficiente de transmisión k 1 , multiplicado por el tiempo. Por lo tanto, la ecuación (2.6) a menudo se escribe en la forma
donde es una constante de tiempo.
Constantes de tiempo T1, T2 y T3 determinar las propiedades dinámicas del enlace. Este tema se discutirá en detalle a continuación.
Factor k 3 representa el coeficiente de transmisión debido a perturbaciones externas.
PÁGINA 1
Otros trabajos similares que te pueden interesar.vshm> |
|||
| 13570. | Modos de calentamiento láser lineal y no lineal | 333,34KB | |
| Modos lineales de calentamiento por láser Para analizar los modos lineales de calentamiento por láser, consideremos los procesos de exposición de un semiespacio a una fuente térmica que disminuye exponencialmente con la profundidad. Por lo tanto, la idealización de las propiedades de las fuentes de calor, a menudo permitida en los esquemas de cálculo para reducir las dificultades matemáticas, puede conducir a desviaciones notables de los datos calculados con respecto a los experimentales. Para materiales opacos, en la mayoría de los casos de calentamiento LR, las fuentes de calor pueden considerarse coeficiente de absorción superficial α 104 105... | |||
| 16776. | Requisitos para la política tributaria estatal en tiempos de crisis | 21,72KB | |
| Requisitos para la política fiscal estatal en una crisis Para el desarrollo de la actividad empresarial en las condiciones económicas modernas, es necesario tener ciertas condiciones incluyendo: - la presencia de un sistema fiscal eficaz que estimule el desarrollo del espíritu empresarial; - la presencia de un determinado conjunto de derechos y libertades, elección del tipo de actividad económica, planificación de fuentes de financiación, acceso a recursos, organización y gestión de la empresa, etc. Así, para un desarrollo progresivo... | |||
| 7113. | Método de linealización armónica | 536,48KB | |
| Método de linealización armónica Dado que este método es aproximado, los resultados obtenidos se aproximarán a la verdad sólo si se cumplen ciertos supuestos: Un sistema no lineal debe contener sólo una no linealidad; La parte lineal del sistema debe ser un filtro. bajas frecuencias debilitar los armónicos más altos que surgen en el ciclo límite; El método es aplicable sólo a sistemas autónomos. Se estudia el libre movimiento del sistema, es decir, el movimiento en condiciones iniciales distintas de cero en ausencia de influencias externas.... | |||
| 12947. | MÉTODO DE LINEALIZACIÓN ARMÓNICA | 338,05 KB | |
| Pasando directamente a la consideración del método de linealización armónica, asumiremos que el sistema no lineal en estudio se reduce a la forma que se muestra en. Un elemento no lineal puede tener cualquier característica siempre que sea integrable sin discontinuidades del segundo tipo. La transformación de esta variable, por ejemplo, mediante un elemento no lineal con zona muerta se muestra en la Fig. | |||
| 2637. | Medicamentos de aplicación. Características generales. Clasificación. Requisitos primarios. Tecnología de aplicación de adhesivos a un sustrato en la producción de medicamentos de aplicación. | 64,04 KB | |
| Medicamentos de aplicación apósitos para callos, apósitos adhesivos, apósitos de pimienta, apósitos líquidos adhesivos para la piel, películas TTC, etc. características generales y clasificación de los parches Los parches Emplstr son una forma farmacéutica para uso externo con capacidad de adherirse a la piel y tener un efecto sobre la piel, los tejidos subcutáneos y, en algunos casos, un efecto general sobre el cuerpo. Los parches son una de las formas farmacéuticas más antiguas conocidas desde tiempos muy antiguos, los antepasados de los fármacos modernos de cuarta generación... | |||
| 7112. | SISTEMAS NO LINEALES | 940,02 KB | |
| Las leyes físicas del movimiento del mundo que nos rodea son tales que todos los objetos de control no son lineales. Otras no linealidades, llamadas estructurales, se introducen deliberadamente en el sistema para obtener las características requeridas del sistema. Si las no linealidades se expresan débilmente, entonces el comportamiento de un sistema no lineal difiere ligeramente del comportamiento de un sistema lineal. Es imposible crear un modelo exacto de un sistema real. | |||
| 21761. | Panteón general de dioses de la antigua Mesopotamia. Dioses de la antigua Sumer | 24,7KB | |
| Religión antigua Los pueblos de Mesopotamia, a pesar de su propio conservadurismo, gradualmente, en el curso de desarrollo Social, sufrió cambios que reflejaron procesos tanto políticos como socioeconómicos que tuvieron lugar en el territorio de Mesopotamia. | |||
| 11507. | formación de resultados financieros y análisis general de las actividades financieras y económicas de la organización. | 193,55KB | |
| Para conocer más profundamente las actividades de cualquier empresa, es necesario estudiarla desde todos los lados posibles para formarse la opinión más objetiva sobre aspectos positivos y aspectos negativos Estamos trabajando para identificar las áreas más vulnerables y las formas de eliminarlas. Para realizar el análisis financiero se utilizan herramientas especiales, los llamados ratios financieros. Utilizar la información necesaria para evaluar de forma objetiva y precisa condición financiera organización de sus cambios de pérdidas y ganancias... | |||
| 13462. | Análisis estadístico de activos riesgosos. Modelos no lineales | 546,54KB | |
| Sin embargo, los datos reales de muchas series temporales financieras muestran que los modelos lineales no siempre reflejan adecuadamente la imagen real del comportamiento de los precios. Si tenemos en cuenta la expansión Doob en la que están involucradas expectativas matemáticas condicionales, es bastante natural suponer que las distribuciones condicionales son gaussianas... | |||
| 4273. | Modelos matemáticos lineales | 3,43 KB | |
| Modelos matemáticos lineales. Se señaló anteriormente que cualquier modelo matemático puede considerarse como un determinado operador A, que es un algoritmo o está determinado por un conjunto de ecuaciones - algebraicas... | |||
Las ecuaciones diferenciales se pueden linealizar utilizando los siguientes métodos:
1. función no lineal área de trabajo se expande a una serie de Taylor.
2. Las funciones no lineales especificadas en forma de gráficas se linealizan en el plano de trabajo mediante líneas rectas.
3. En lugar de determinar directamente derivadas parciales, se introducen variables en las ecuaciones no lineales originales.
 ,
,
 .
(33)
.
(33)
4. Este método se basa en la determinación de coeficientes mediante el método de mínimos cuadrados.
 ,
(34)
,
(34)
Dónde  - constante de tiempo del accionamiento neumático;
- constante de tiempo del accionamiento neumático;
 - coeficiente de transmisión del accionamiento neumático;
- coeficiente de transmisión del accionamiento neumático;
 - coeficiente de amortiguación del accionamiento neumático.
- coeficiente de amortiguación del accionamiento neumático.
La estructura interna de los elementos ACS se determina de forma más sencilla mediante diagramas estructurales de gráficos. A diferencia de los diagramas estructurales conocidos en los gráficos, las variables se indican en forma de tiempo y los arcos indican parámetros o funciones de transferencia de enlaces típicos. Hay una proporción uniforme entre ellos.
![]()
![]()
![]()
![]()
![]()


mm elementos no lineales
Los métodos de linealización discutidos en el primer capítulo son aplicables cuando la no linealidad incluida en el objeto LSA es al menos una vez diferenciable o se aproxima por una tangente con un pequeño error de alguna vecindad cercana al punto de operación. Existe toda una clase de no linealidades para las cuales no se cumplen ambas condiciones. Generalmente se trata de no linealidades significativas. Estos incluyen: funciones escalonadas, lineales por partes y multivaluadas con puntos de discontinuidad del primer tipo, así como funciones potenciadas y transtendentes. El uso de computadoras que aseguran la ejecución de operaciones lógico-algebraicas en los sistemas ha dado lugar a nuevos tipos de linealidades, las cuales se representan a través de variables continuas utilizando una lógica especial.
Para describir matemáticamente tales no linealidades, se utilizan funciones de transferencia equivalentes, dependiendo de los coeficientes de linealización, que se obtienen minimizando el error cuadrático medio al reproducir una señal de entrada determinada. La forma de las señales de entrada que llegan a la entrada no lineal puede ser arbitraria. En la práctica, los más extendidos son los tipos armónicos y aleatorios de señales de entrada y sus combinaciones de tiempo. En consecuencia, los métodos de linealización se denominan armónicos y estáticos.
Método general para describir funciones de transferencia equivalentes.
Toda la clase de no linealidades significativas se divide en dos grupos. El primer grupo incluye no linealidades inequívocas en las que la conexión entre la entrada  y fines de semana
y fines de semana  Las señales vectoriales dependen sólo de la forma de la característica de no linealidad estática.
Las señales vectoriales dependen sólo de la forma de la característica de no linealidad estática.  .
.
 .
.

En este caso, con una determinada forma de señales de entrada:
 .
.
Usando la matriz de linealización  Puedes encontrar el valor aproximado de las señales de salida:
Puedes encontrar el valor aproximado de las señales de salida:
 .
.
De (42) se deduce que la matriz de coeficientes de linealización de no linealidades univaluadas son cantidades reales y sus funciones de transferencia equivalentes:
 .
.
El segundo grupo incluye no linealidades de dos valores (multivalores), en las que la conexión entre las señales de entrada y salida depende no solo de la forma de la característica estática, sino que también está determinada por el historial de la señal de entrada. En este caso, la expresión (42) se escribirá como:

 .
.
Para tener en cuenta la influencia del historial de la señal periódica de entrada, tendremos en cuenta no solo la señal en sí  , sino también la tasa de su cambio, el diferencial
, sino también la tasa de su cambio, el diferencial  .
.
Para señales de entrada:
 el valor aproximado de la señal de entrada será:
el valor aproximado de la señal de entrada será:
Dónde  Y
Y  - coeficientes de linealización armónica de no linealidades de dos valores;
- coeficientes de linealización armónica de no linealidades de dos valores;
 - período de oscilación según el armónico derecho;
- período de oscilación según el armónico derecho;
 - función armónica.
- función armónica.
Función de transferencia equivalente:
Hay no linealidades de una forma más general:
 ,
,
 ,
,
Dónde  Y
Y  - coeficientes de linealización armónica;
- coeficientes de linealización armónica;
 - número armónico.
- número armónico.
Matrices de coeficientes de linealización periódica con período.  . Teniendo esto en cuenta, la función de transferencia de dos no linealidades de dos valores se puede representar por analogía con la función de transferencia
. Teniendo esto en cuenta, la función de transferencia de dos no linealidades de dos valores se puede representar por analogía con la función de transferencia
Usando esto, definiremos una fórmula generalizada para calcular la función de transferencia de no linealidades de un solo valor y de dos valores.
En el caso de no linealidad inequívoca, la matriz de coeficientes de linealización  , dependiendo de los parámetros del vector
, dependiendo de los parámetros del vector  , elegimos de tal manera que linealicemos el valor promedio de la diferencia al cuadrado entre los valores exactos
, elegimos de tal manera que linealicemos el valor promedio de la diferencia al cuadrado entre los valores exactos  y cerca
y cerca  señales de entrada:
señales de entrada:
Después de transformaciones, simplificaciones, trucos y mayor vigilancia, obtenemos una función de transferencia equivalente en forma de sistema de matrices:  ,
, .
.
 ,
,
en  ,
, .
.
 .
.
Determine el coeficiente de linealización para la no linealidad de un solo valor. Cuando llega a su entrada el primer armónico de una señal sinusoidal:
Dónde  .
.
 .
.
La ecuación (56) es el primer coeficiente de linealización armónico para una no linealidad de un solo valor, determina la función de transferencia equivalente  .
.
A continuación, compararemos la fórmula para determinar los coeficientes de linealización de las no linealidades más simples cuando se suministran señales periódicas a su entrada: sinusoidal, triangular, y mostraremos la viabilidad de utilizar las funciones de transferencia equivalentes resultantes.
Determinemos el coeficiente de linealización.  ,
, .
.
 ,
,
 .
.
Ejemplo. Determine el coeficiente de linealización de una no linealidad de dos valores cuando el primer armónico de una señal sinusoidal llega a su entrada y tiene una entrada. Del sistema matricial (60), obtenemos:
 ,
,
 .
.
En este ejemplo, escribimos la señal de entrada en la forma:
 ,
,
 .
.
Cuando para una no linealidad de dos valores la función equivalente general es:
 .
.
.
.